生物3D打印的發展,為生物醫學應用鋪平了道路。将功能性材料(如生物組織等)和設備(如柔性電子等)與人體無縫集成在人體組織、器官以及人機界面,具有廣闊應用前景。通用的方式是通過體外組織工程加生物打印構建定制化移植物,再以開放式手術将移植物植入體内。這樣,與目标位置的匹配問題(如幾何形态和模量等,特别是不定形柔軟組織的表面)是構建體内移植物的難點。同時,過大的手術傷口也會增加手術風險和術後恢複時間,這與當今臨床醫學的發展理念背道而馳。
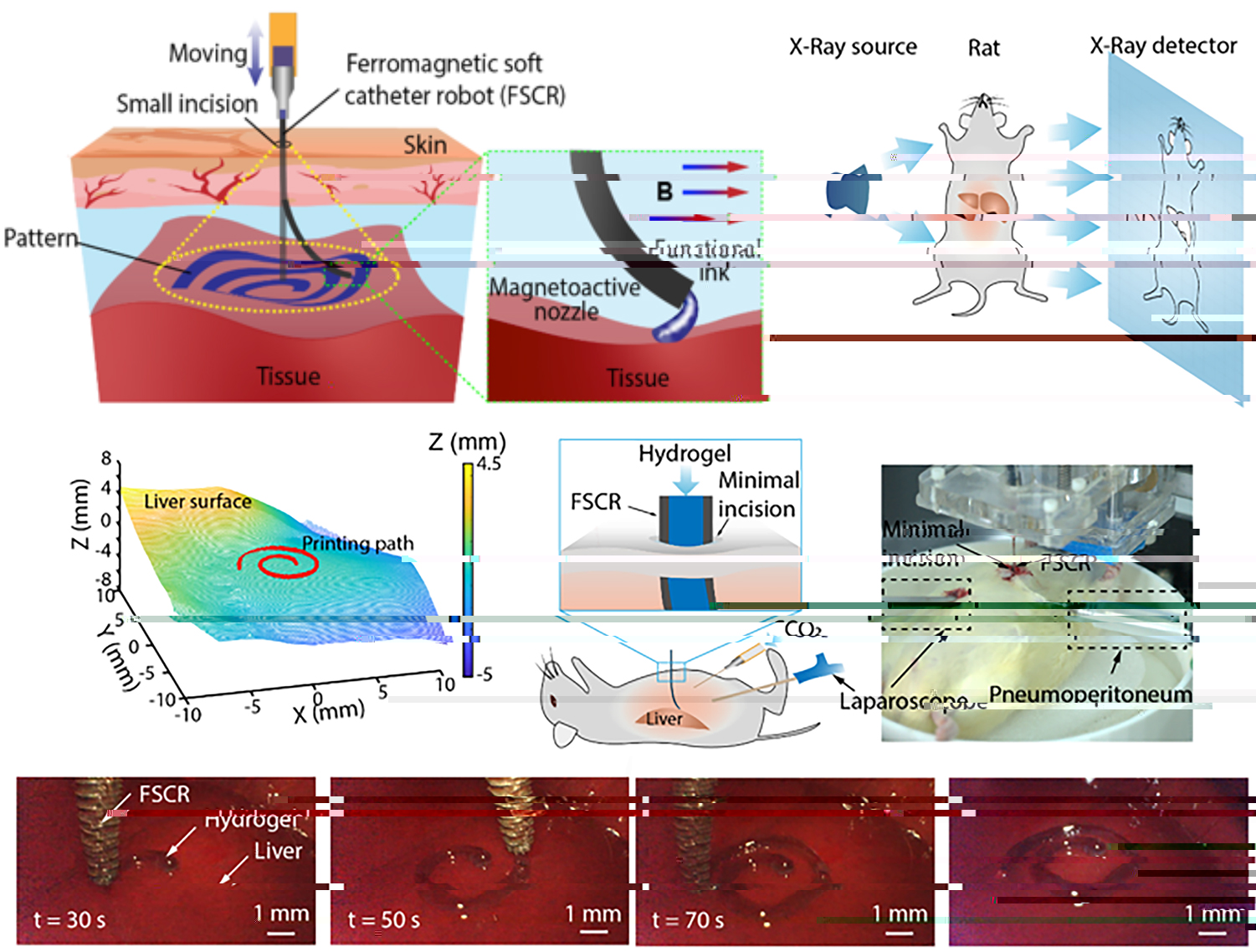
圖1 用于微創生物打印的磁軟導管機器人及其在實驗鼠體内微創原位打印展示
針對上述問題,6774澳门永利臧劍鋒教授團隊與合作者提出,将磁控軟體機器人的優勢應用于3D打印,通過微創手術将功能性材料直接沉積在内部器官上。軟體機器人的靈活性和微型化為現代醫療提供了機會。可遠程非接觸式控制的磁性軟導管機器人能夠在受限、易變形、複雜環境中進行微創導航,以到達難以觸及的區域。通過磁控軟導管機器人末端完成體内導航定位,再由導管機器人内部通道實現體外到體内的材料遞送,進而完成體内微創原位打印(入口處2~4 mm,打印面積0~27 cm2)。該工作成功地實現了多材料的體外非接觸式打印和小鼠體内肝髒表面微創原位水凝膠打印,近日以“Ferromagnetic Soft Catheter Robot for Minimally Invasive Bioprinting”為題發表在《自然通訊》期刊。碩士研究生周成和羊佑舟為論文共同第一作者,臧劍鋒與王柳為共同通訊作者。論文鍊接:https://rdcu.be/cvA9K


